Bộ điều khiển PID là gì?
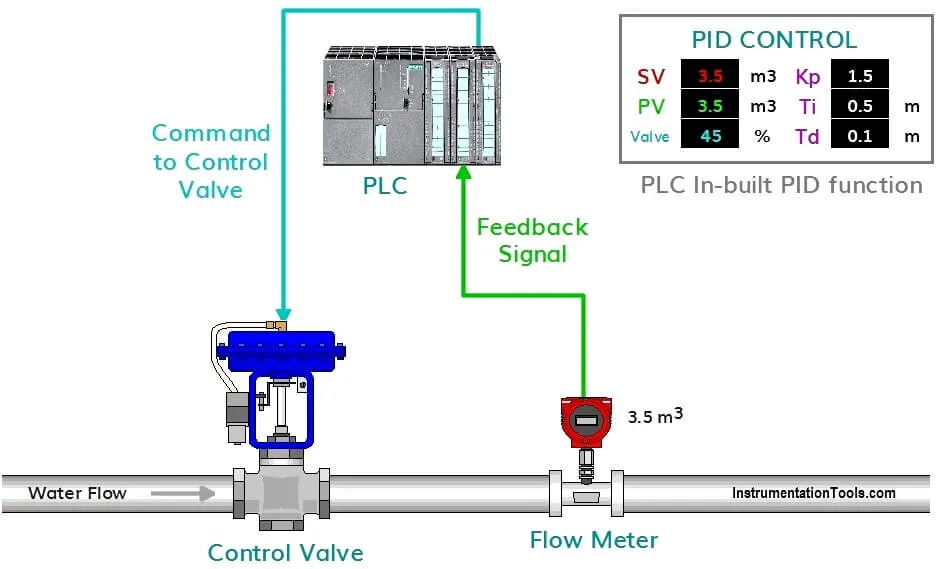
Bộ điều khiển PID được sử dụng rộng rãi trong các ngành công nghiệp ngày nay. Mặc dù có các chức năng điều khiển PID có sẵn trong PLC, nhưng các chức năng này được sử dụng trong nhiều ứng dụng. Khoảng 95% quy trình khép kín trong lĩnh vực tự động hóa công nghiệp sử dụng loại bộ điều khiển này.
PID là viết tắt của Tỷ lệ-Tích phân-Đạo hàm. Ba bộ điều khiển này được kết hợp theo cách mà chúng có thể kiểm soát quá trình theo giá trị do người dùng xác định.
Một ví dụ để hiểu rõ hơn về hoạt động của Bộ điều khiển PID.
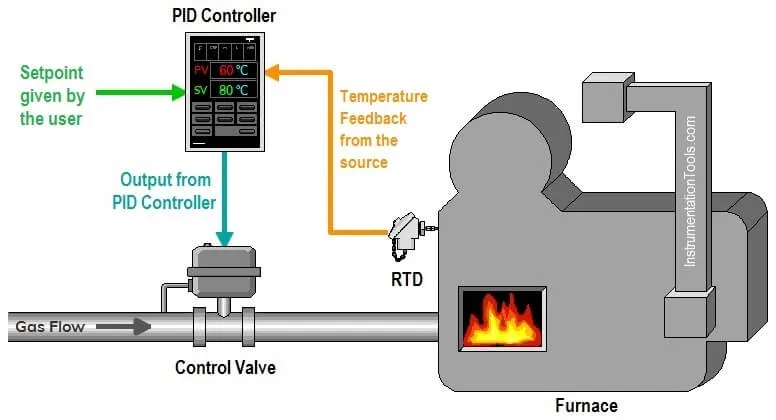
Hệ thống PID điều khiển lò sấy
Đây là một ví dụ nhỏ về quá trình điều khiển nhiệt độ sử dụng bộ điều khiển PID. Chúng tôi có một lò ở đây và chúng tôi muốn kiểm soát nhiệt độ của lò. Đó là lý do tại sao chúng ta phải đưa ra một số giá trị nhiệt độ mà chúng ta muốn duy trì và giá trị nhiệt độ này được gọi là giá trị mong muốn hoặc giá trị cài đặt .
Nhiệt độ của lò chúng tôi đang nhận ở đây thông qua một máy dò nhiệt độ, cảm biến RTD , được kết nối trực tiếp với bộ điều khiển PID. Đây được chúng tôi gọi là phản hồi hoặc giá trị thực tế . Phản hồi hoặc giá trị thực tế này được so sánh với giá trị đặt và sự khác biệt giữa hai tín hiệu này là lỗi của chúng tôi . Bộ điều khiển PID sẽ tạo ra đầu ra dựa trên sự so sánh này và sẽ cung cấp đầu ra cho van điều khiển.
Để duy trì nhiệt độ của lò, chúng tôi đang kiểm soát dòng khí ở đây bằng một van điều khiển. Vị trí của van điều khiển này được quyết định ở đây thông qua đầu ra bộ điều khiển PID . Thời gian phản hồi của quá trình sẽ chỉ phụ thuộc vào ba giá trị như Độ lợi tỷ lệ, Thời gian tích phân và thời gian đạo hàm. Chế độ điều khiển tỷ lệ (P-Controller):
Bộ điều khiển tỷ lệ tạo ra đầu ra điều khiển tỷ lệ với lỗi. Giá trị lỗi này được nhân với độ lợi tỷ lệ để xác định đáp ứng của đầu ra.
Nếu độ lợi được đặt quá cao, thì đầu ra của bộ điều khiển bắt đầu dao động và trở nên không ổn định và nếu độ lợi được đặt ở giá trị rất thấp thì đầu ra của bộ điều khiển sẽ không đáp ứng với những thay đổi của giá trị đặt.
Việc sử dụng bộ điều khiển tỷ lệ một mình có một nhược điểm lớn. Độ lệch là một lỗi kéo dài và sẽ không được loại bỏ bằng cách sử dụng một bộ điều khiển tỷ lệ.
Tốc độ của phản ứng được tăng lên khi tăng tỷ lệ thuận. Chế độ điều khiển tích hợp (PI-Controller):
Do giới hạn của bộ điều khiển tỷ lệ, sự bù đắp liên tục được đưa ra. Bộ điều khiển tích hợp sẽ liên tục tăng và giảm đầu ra của bộ điều khiển để giảm lỗi.
Nếu giá trị lỗi lớn, chế độ tích phân sẽ tăng / giảm đầu ra bộ điều khiển nhanh và nếu giá trị lỗi nhỏ, chế độ tích phân sẽ làm chậm chức năng.
Đối với thời gian tích phân lớn, tốc độ phản hồi của bộ điều khiển sẽ chậm lại, và đối với thời gian tích phân nhỏ, tốc độ phản hồi sẽ nhanh.
Chế độ điều khiển phái sinh (PID-Controller):
Có một hạn chế của bộ điều khiển I là nó không thể dự đoán hành vi lỗi trong tương lai. Vì vậy, nó chỉ phản ứng một lần khi có sự thay đổi trong giá trị đặt.
Bộ điều khiển phái sinh tạo ra đầu ra dựa trên tốc độ thay đổi của lỗi và sẽ hoạt động nhanh sau đó bộ điều khiển PI . Nếu không có thay đổi trong lỗi, đầu ra của bộ điều khiển này bằng không.
Tốc độ của phản ứng được tăng lên với sự gia tăng trong thời gian đạo hàm . Nếu giá trị của thời gian đạo hàm quá lớn thì dao động sẽ xảy ra và hệ thống sẽ mất ổn định. Đối với giá trị 0 của thời gian đạo hàm, đầu ra của bộ điều khiển sẽ trở thành 0.